![]() ROTARY SPARK GAP OVERVIEW
ROTARY SPARK GAP OVERVIEW
The rotary spark gap overcomes many of the deficiencies of the static gap mentioned in the previous section. This is achieved by making use of rapidly moving electrodes instead of fixed ones. Although the electrodes usually pass very close to each other, they do not touch. The rotary spark gap fires by the same breakdown process as the static gap except for one major difference:-
A rotary spark gap only has the option of firing when the electrodes are aligned. The times when the electrodes are physically aligned are known as "presentations". Between presentations the electrodes are sufficiently separated that breakdown cannot occur regardless of the tank capacitor voltage. (-within reasonable limits.)
|
|
A simple rotary spark gap consists of a pair of fixed electrodes and a pair of "flying" electrodes mounted on a spinning disc. If the disc is turned at a constant angular velocity by a motor, then the electrodes will align periodically. Every time a presentation occurs, the spark gap can fire if there is sufficient voltage to cause breakdown of the air gaps. (Real picture.) |
Due to these periodic presentations, the operation of a rotary spark gap is somewhat different to that of a static gap:
A static spark gap fires whenever the tank capacitor voltage reaches a fixed breakdown voltage, but the timing of the firings is somewhat irregular. It is essentially a constant voltage switch. (Static gap firing waveform can be seen here.)
In contrast, a rotary spark gap fires at regular intervals, (determined by the speed of rotation,) but the firing voltage can often be irregular. It is essentially a constant frequency switch, regardless of what voltage is actually present.
Static gap systems and rotary based systems must both satisfy the same fundamental power equation:
|
P = 0.5 x BPS x C x V² |
Where: |
P = Power throughput in Watts,BPS = Firing frequency in Breaks per Second, C = Tank Capacitor size in Farads, V = Firing voltage in Volts, |
In a system containing a static gap, the firing frequency depends on the power being processed and the tank capacitor size. A particular power supply and capacitor combination results in a particular firing frequency in order to process the available power. If either the power input P or the capacitor size C are changed then this causes a change in the firing rate BPS. In summary:
|
- Decrease in power input, |
Result: |
Capacitor recharges slower. The firing rate decreases to process the lower power. |
Firing voltage remains constant. |
|
- Increase in power input, |
Result: |
Capacitor recharges quicker. The firing rate increases to process the extra available power. |
Firing voltage remains constant. |
|
- Decrease in capacitor size, |
Result: |
Capacitor recharges quicker. The firing rate increases to keep the same power throughput. |
Firing voltage remains constant. |
|
- Increase in capacitor size, |
Result: |
Capacitor recharges slower, The firing rate decreases to keep the same power throughput. |
Firing voltage remains constant. |
Notice how the firing voltage V is fixed by the breakdown voltage of the static gap and is unaffected by changes in the power input or the capacitor size.
In a system with a rotary gap, the situation is quite different. The designer forces the firing frequency BPS to be dictated by the speed of the rotating disc. If either the power input or the capacitor size, or firing rate are changed then the firing voltage V changes:
|
- Decrease in power input, |
Result: |
Firing rate remains constant. |
Firing voltage decreases to process the lower available power. (smaller bang size.) |
|
- Increase in power input, |
Result: |
Firing rate remains constant. |
Firing voltage increases to process the extra available power. (bigger bang size.) |
|
- Decrease in capacitor size, |
Result: |
Firing rate remains constant. |
Firing voltage increases to keep the same power throughput. (same bang size.) |
|
- Increase in capacitor size, |
Result: |
Firing rate remains constant. |
Firing voltage decreases to keep the same power throughput. (same bang size.) |
Care must be taken when replacing a static gap with a rotary gap, especially if the firing rate of the rotary spark gap is designed to be lower than the firing frequency of the previous static gap. The forced reduction in firing rate allows more time for the tank capacitor to charge between firings. The result is that the tank capacitor charges to a much higher voltage in order to process the same available power at the reduced firing rate. For example, if the rotary gap fires at half the firing frequency of the original static gap, then the peak capacitor voltage will be approximately 41% higher. This can over stress components, and may also cause problems with racing arcs over the surface of the secondary.
In order to prevent the tank capacitor from being charged to excessively high voltages, the problem can be avoided by either using a bigger tank capacitor or by increasing the firing rate of the rotary spark gap. Increasing either C or BPS reduces the firing voltage V and the peak voltage seen by the capacitor. In all cases the implications of changing any variable in the power equation should be evaluated, to ensure that component ratings are not exceeded.
Correct setting of the rate at which the spark gap fires is very important to achieve good power transfer through the charging circuit, and to prevent over-voltage problems from occurring. Unfortunately there is a complex interaction between the firing rate, capacitor size, and supply rating which determines power throughput. This is discussed in some depth in the section on asynchronous rotary operation.
Rotary spark gaps can be divided into two distinct categories depending on their firing rates:
Asynchronous rotary spark gaps use a disc which rotates at a speed that is not related to the supply frequency. This means that the electrodes will line-up at regular intervals, but which do not occur at the same place in each cycle of the AC supply. This causes a series of evenly timed firings, but which occur at varying voltages. The graph below shows an example of the firing waveform obtained using an asynchronous spark gap with an AC supply. The firing frequency of 330 BPS is obviously not a multiple of the 50 Hz supply frequency, and it can be clearly seen that the firing positions and voltages differ from one cycle to the next.
The asynchronous spark gap is very flexible as the speed can be varied over a wide range to evaluate the effect of different firing rates. However, in practice the difference between the firing frequency and the supply frequency can cause surging or beating at low speeds. This is very severe if the firing rate is much below 200 BPS and can make smooth operation almost impossible. At firing rates above 200 BPS the beating disappears quickly, and therefore Asynchronous rotary spark gaps are usually run at high speed.
(The Asynchronous rotary would seem to be best utilised in a system supplied from a DC power source. In this instance the removal of the line-frequency component eliminates beating and allows the full potential of the asynchronous rotary to be realised. The author has little practical experience of DC powered Tesla Coil systems, but is aware of other's success in this field.)
Simulation results for operation in an 50Hz AC system are discussed in the section on asynchronous rotary operation.
Asynchronous rotary spark gaps can be considered as the "General Case", whereas the synchronous rotary results from a single refinement…
Synchronous rotary gaps,
Synchronous rotary spark gaps use a disc which rotates at a speed that is locked to the supply frequency. For example, a 3000rpm synchronous motor rotates at the supply line frequency of 50 revolutions per second. This means that the electrodes line-up at regular intervals which occur at precisely the same place in each cycle of the AC supply. This causes a series of evenly timed firings with consistent voltages. The graph below shows an example of the firing waveform obtained using a synchronous spark gap which fires at 100 BPS with a supply frequency of 50 Hz. The firing frequency of 100 BPS is a multiple of the 50 Hz supply frequency, and it can be clearly seen that the firing voltage is the same from one cycle to the next.
Common firing rates for a synchronous rotary spark gap running in a 50Hz system are 100BPS or 200BPS, although any integer multiple of the supply frequency can be used. At firing frequencies above 400BPS the benefits of the synchronous rotary become progressively less significant when compared to an asynchronous rotary running at similar speed.
Since the firing points of the synchronous rotary occur at precisely the same point in every cycle of the AC supply, the choice of the actual firing position is very important. By adjusting the orientation of the synchronous motor in its mounting, the firing point of the spark gap can be made to occur at any chosen point along the AC supply cycle. The actual firing position is referred to as the "rotary phase setting". This term describes the time at which the firing occurs relative to the zero-crossing of the supply voltage. (In the graph above, the firing occurs just before the supply voltage zero-crossing takes place.)
Clearly, the phase settings which result in maximum voltage at the instant of firing, will give the best performance. This is the key to correctly setting a synchronous rotary gap. Unfortunately, the best timing depends on the disc speed, tank capacitor value and the power supply rating. This subject is discussed in depth in the sections dealing with synchronous rotary operation.
In order to produce consistently long sparks from a Tesla Coil it is necessary to transfer as much power as possible from the AC supply, through the charging circuit via the spark gap, into the primary winding. The synchronous rotary gap has the advantage over asynchronous designs in terms of efficiency in this area.
In a correctly designed synchronous rotary system, all of the firing points consistently occur at maximum voltage. Therefore each firing contributes a large amount of energy, giving good power transfer. This can be contrasted to the asynchronous case where there are some firings at high amplitudes and many "runt firings" at lower voltages, (see graphs above.) Since energy is proportional to firing voltage squared, these runt firings contribute little energy to the Tesla Coil primary circuit. They also return the capacitor to the discharged state, forcing the charging cycle to begin again from square one. This is not a very efficient use of the available power.
Some properties of synchronous and asynchronous rotary spark gaps are given below:
|
Asynchronous rotary |
Synchronous rotary |
|
A wide range of firing rates are possible for flexibility during experimentation, |
Firing rate is fixed at the design stage, |
|
The optimal operating point of the system can be found by varying the firing rate, |
The system should be designed to be optimal at the synchronous firing rate, |
|
Easy to build, can use any general purpose AC or DC motor, |
Requires an induction motor to be modified for salient pole, synchronous operation, |
|
No special set-up is required, |
Requires firing phase to be carefully set for correct operation, |
|
Produces frantic spark action, with frequent long sparks, |
Produces more consistent, slowly evolving spark action, |
|
Requires low ballast inductance, particularly at high speed. (This implies higher fault currents.) |
Good power throughput with large ballast inductance, (which also limits fault current.) |
|
Can cause damaging resonant rise in charging circuit, (particularly at speeds below 200bps.) |
Peak voltage stays constant because resonant rise is kept under control, |
|
Can give surging/beating problems below 200bps, |
No beating because operation is synchronous with the supply frequency, |
|
Rotary speed can be used to control power throughput in DC powered systems, |
Ideal for analysis and taking measurements. |
In general a rotary spark gap is preferable to a static gap for serious Tesla coil work because of the following advantages:
When a static gap is used in a Tesla coil system, the static gap itself imposes a maximum limit on the primary voltage due to its own breakdown potential. If the capacitor charges to sufficient potential then the static gap fires, discharging the capacitor into the primary coil. If the static gap is set correctly then there is little chance of any components being over-volted.
Unlike a static gap, the voltage across a rotary spark gap is not limited by the rotary gap itself.
The voltage across the rotary, supply transformer and tank capacitor can rise to very high levels, at the instants when the rotary electrodes are not aligned. This voltage rise can be particularly dramatic if the rotary gap is set up incorrectly, or if there is a firing missed when the electrodes align. Both of these situations result in insufficient energy being taken out of the resonant charging system, and can easily result in voltages of more than double that found in normal operation.
Such high voltage peaks subject the supply transformer, tank capacitor and insulation to considerable dielectric stress, which can easily cause failure. Clearly it is desirable to take some measures to limit the absolute maximum voltage to safeguard expensive components in the event of mishaps. Fortunately this can be achieved cheaply and with relative ease. Enter the safety gap…
The easiest way to limit the primary voltage between electrode presentations is by connecting a single static gap in parallel across the terminals of the rotary spark gap. This static spark gap is known as a safety gap, because it does not function in normal operation but is responsible for the safe clamping of the primary voltage under abnormal conditions.
A single static gap has a very repeatable breakdown voltage if it is constructed correctly, and should be designed with the following properties in mind:-
![]() A Single gap that is adjustable with high precision. This allows the breakdown voltage to be set very accurately,
A Single gap that is adjustable with high precision. This allows the breakdown voltage to be set very accurately,
![]() Breakdown voltage set above that found in normal operation, but below that which could cause damage to components.
Breakdown voltage set above that found in normal operation, but below that which could cause damage to components.
![]() Rounded arcing faces to the safety gap electrodes, to prevent corona and give a more consistent breakdown voltage.
Rounded arcing faces to the safety gap electrodes, to prevent corona and give a more consistent breakdown voltage.
![]() Low power handling capability. The safety gap should only fire during faults so it handles comparatively little power.
Low power handling capability. The safety gap should only fire during faults so it handles comparatively little power.
![]() Located away from any other HV items which could interfere with the shape of the electric field in the safety gap.
Located away from any other HV items which could interfere with the shape of the electric field in the safety gap.
In addition to these points, the safety gap should be firmly mounted and securely connected into the primary circuit. This is important because if there is a mechanical failure in the rotary, the safety gap must remain connected across the transformer and correctly "gapped". A safety gap is only useful if its integrity is guaranteed.
|
|
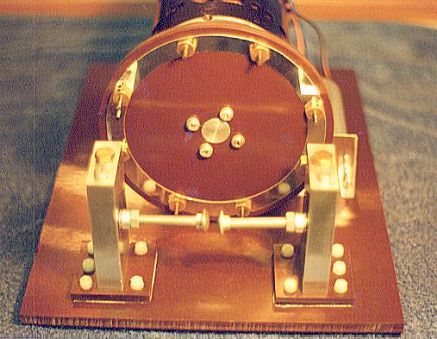
The author has found carriage bolts (with rounded heads), or small brass drawer knobs to be very effective as safety gap electrodes, provided they are not coated with any form of lacquer or anodising. The picture opposite shows a 200BPS synchronous rotary spark gap with an adjustable safety gap connected across the main terminal posts. One carriage bolt is fixed. The opposite bolt can be rotated in its tapped mounting in order to adjust the gap distance. Once the breakdown voltage is set, a locknut is tightened to ensure that there is no further movement. |
Ideally the safety gap should be set up with an adjustable HV source and calibrated HV meter, so that its breakdown voltage can be set very accurately. This provides the designer with a high degree of confidence that the safety gap will act quickly in the event of a fault.
If the required test equipment is not available, the air gap width can be used as an approximate guide to the breakdown voltage. Here is a graph which was prepared using measurements taken from a recent safety gap:
With rounded electrodes the breakdown voltage can be somewhat higher than expected for small air gaps. It is best to err on the side of caution and set the gap too close to start with, especially if measuring equipment is not available.
A safety gap which is set correctly should not fire during normal operation at full power. However, if it is closed even slightly, it should begin to fire occasionally when the system is run at maximum power. Any changes to the system such as ballasting, rotary firing rate, or capacitor size that alter the peak primary voltage may demand that the safety gap is adjusted slightly.
An otherwise quiet safety gap which suddenly starts barking is the best indication that you get if something is going wrong. Cut the power and correct the problem. Do not widen the safety gap.
The author recently had a rotary gap motor fail during a high power run. The synchronous motor lost torque, and the disk began to loose speed while the coil was running at full power ! The safety gap connected across the rotary immediately sprang to life. The safety gap clamped the voltage between the rotary electrode presentations (which were growing few and far between !) Power was cut quickly after the safety gap lit, but it was several seconds before it was obvious that the rotary disk was actually slowing down.
This account shows the effectiveness of the safety gap in such a nasty failure condition. In particular it highlights that the safety gap is incredibly fast acting. There is no way that the operator could have noticed the failing rotary motor, and removed power before the tank capacitor was subject to potentially damaging voltages. The safety gap acts within microseconds.
A safety gap is cheap to build, inactive during normal operation and could save hundreds of pounds worth of expensive components when something goes wrong. In my opinion the time taken to construct and set up a good safety gap is time well spent.

{kind=link}
{kind=link}
{kind=link}